 Input/Output¶
Input/Output¶
MC01S can send and receive messages through a CAN bus with Serial protocol, this communication system is named as Serial-Over-CAN. This is necessary to establish the communication with a Veronte Autopilot 1x.
Note
TX corresponds to transmitted messages and RX to received messages.
First of all, it is necessary to set the appropriate Baudrate (i.e. the communication speed, expressed in bits per second) of the CAN bus.
SCIA Serial CAN¶
Serial messages received/sent through the SCIA (RS-232) port can be sent via CAN.
This menu internally configures the following connection:
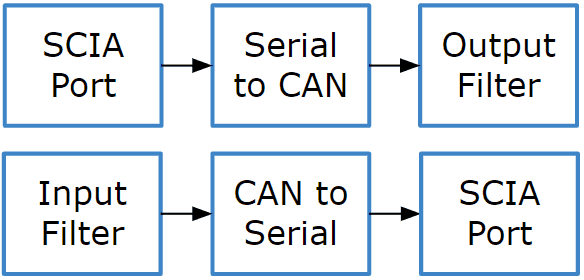
Input/Output menu - SCIA Serial CAN schema¶
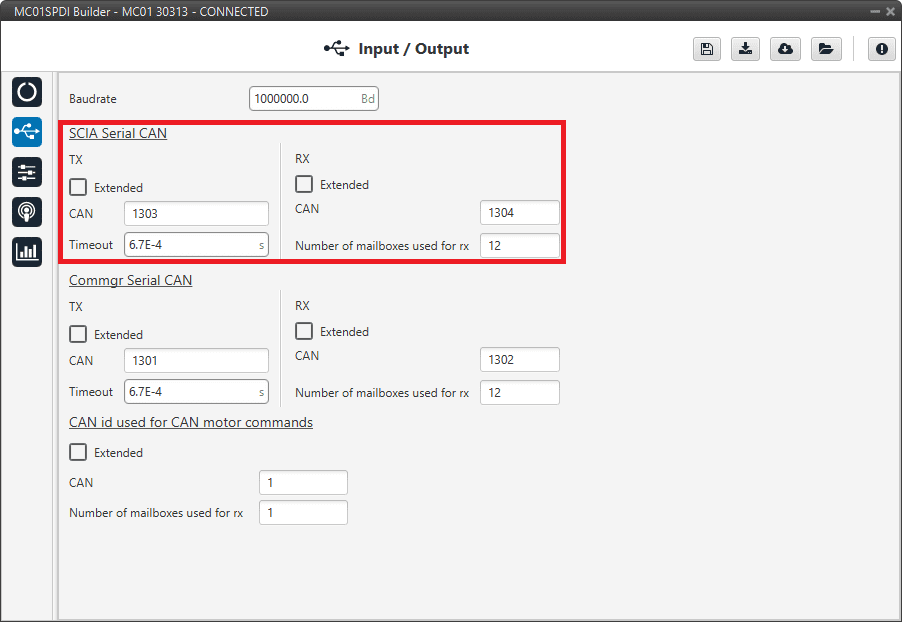
Input/Output menu - SCIA Serial CAN section¶
TX:
Extended: If enabled, the frame format will be this, ‘Extended’, i.e. with a 29-bit identifier. Otherwise, the frame format ‘Standard’ (11-bit identifier) is set by default.
CAN: CAN Id of the message to be sent must be set. The value set has to be decimal format.
Timeout: This is the threshold time between receptions to consider that it is not being received correctly.
RX: Configuration for receiving messages (as Mailboxes in the Veronte Autopilot 1x configuration)
Extended: Select this option for 29-bit IDs.
CAN: 11-bits (Standard) or 29-bits (Extended) ID used to identify the CAN message to be received. The value set has to be decimal format.
Number of mailboxes used for rx.
Commgr Serial CAN¶
Serial messages received/sent through the Commgr port can be sent via CAN.
Warning
This configuration is already done by default in order to allow communication via CAN between 1x Autopilot and MC01S. It must not be modified.
This menu internally configures the following connection:
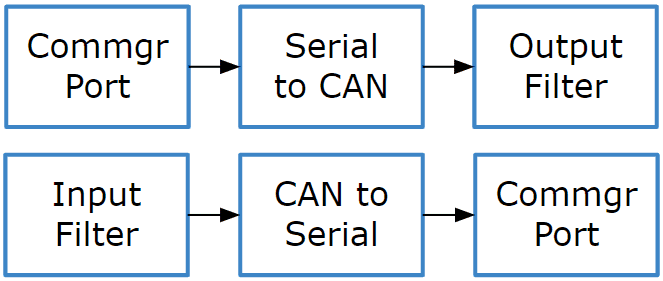
Input/Output menu - Commgr Serial CAN schema¶
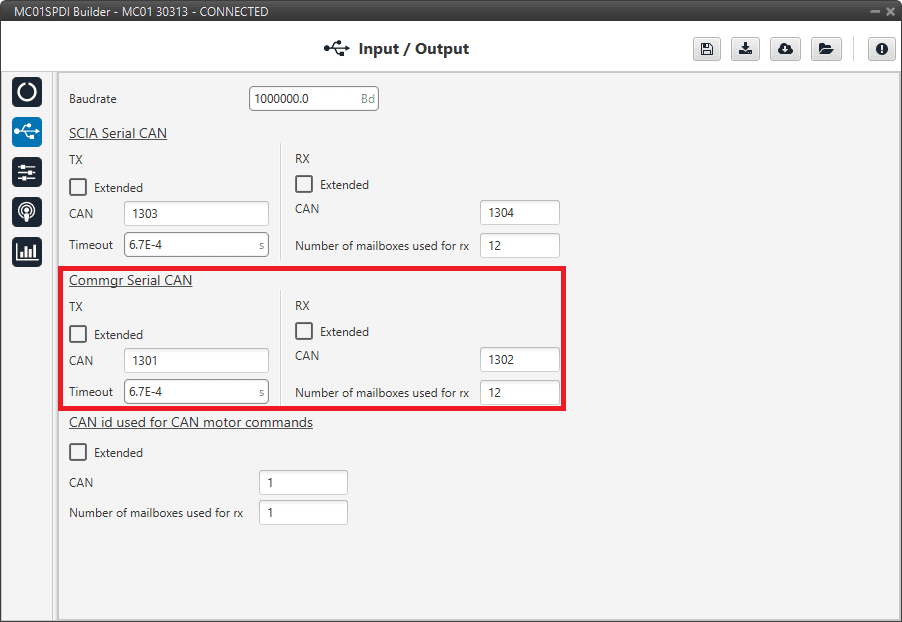
Input/Output menu - Commgr Serial CAN section¶
TX:
Extended: If enabled, the frame format will be this, ‘Extended’, i.e. with a 29-bit identifier. Otherwise, the frame format ‘Standard’ (11-bit identifier) is set by default.
CAN: CAN Id of the message to be sent must be set. The value set has to be decimal format.
Timeout: This is the threshold time between receptions to consider that it is not being received correctly.
RX: Configuration for receiving messages (as Mailboxes in the Veronte Autopilot 1x configuration)
Extended: Select this option for 29-bit IDs.
CAN: 11-bits (Standard) or 29-bits (Extended) ID used to identify the CAN message to be received. The value set has to be decimal format.
Number of mailboxes used for rx.
CAN id used for CAN motor commands¶
MC01S requires a CAN id to send the desired position to the motor.
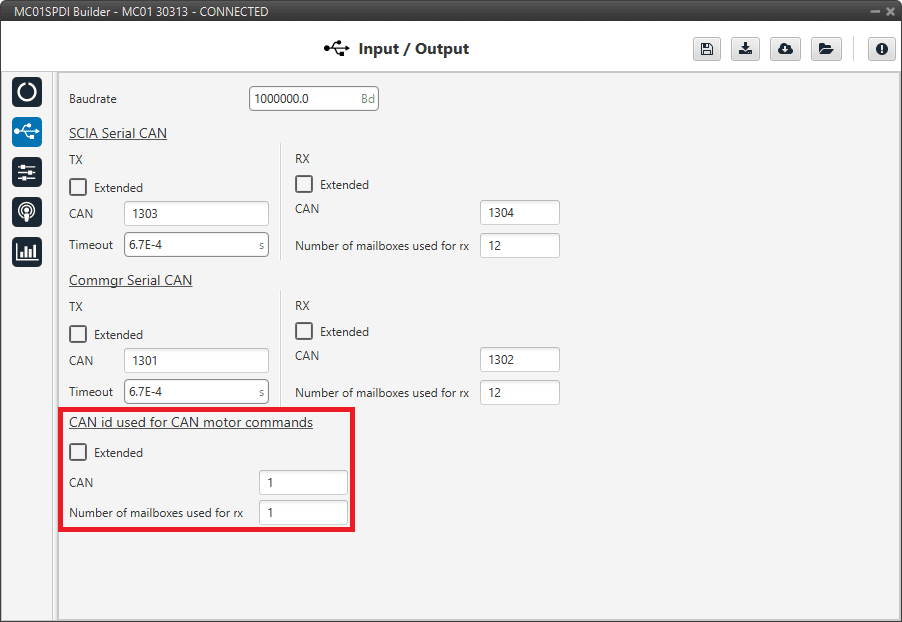
Input/Output menu - CAN id used for CAN motor commands section¶
Extended: If enabled, the frame format will be this, ‘Extended’, i.e. with a 29-bit identifier. Otherwise, the frame format ‘Standard’ (11-bit identifier) is set by default.
CAN: CAN Id through which the MC01S will send the position of the motor.
Number of mailboxes for rx.